知觉引擎模拟哪些效果
知觉引擎的的结构和功能
1.1.知觉引擎的三级结构
《十二支缘起的唯识古义阐释(一)》《摄大乘论十一识的解释与十二缘起》《从感觉到认知模型》《受想思迷执与十二缘起》《心所与潜意识投射》《种子的层次结构》《十二缘起即觉知的幻起》等六篇文章勾勒出比较详细的从种子生起觉知的过程,每一步都落实到了硬件——某种识或心所,而且都有经论支持。
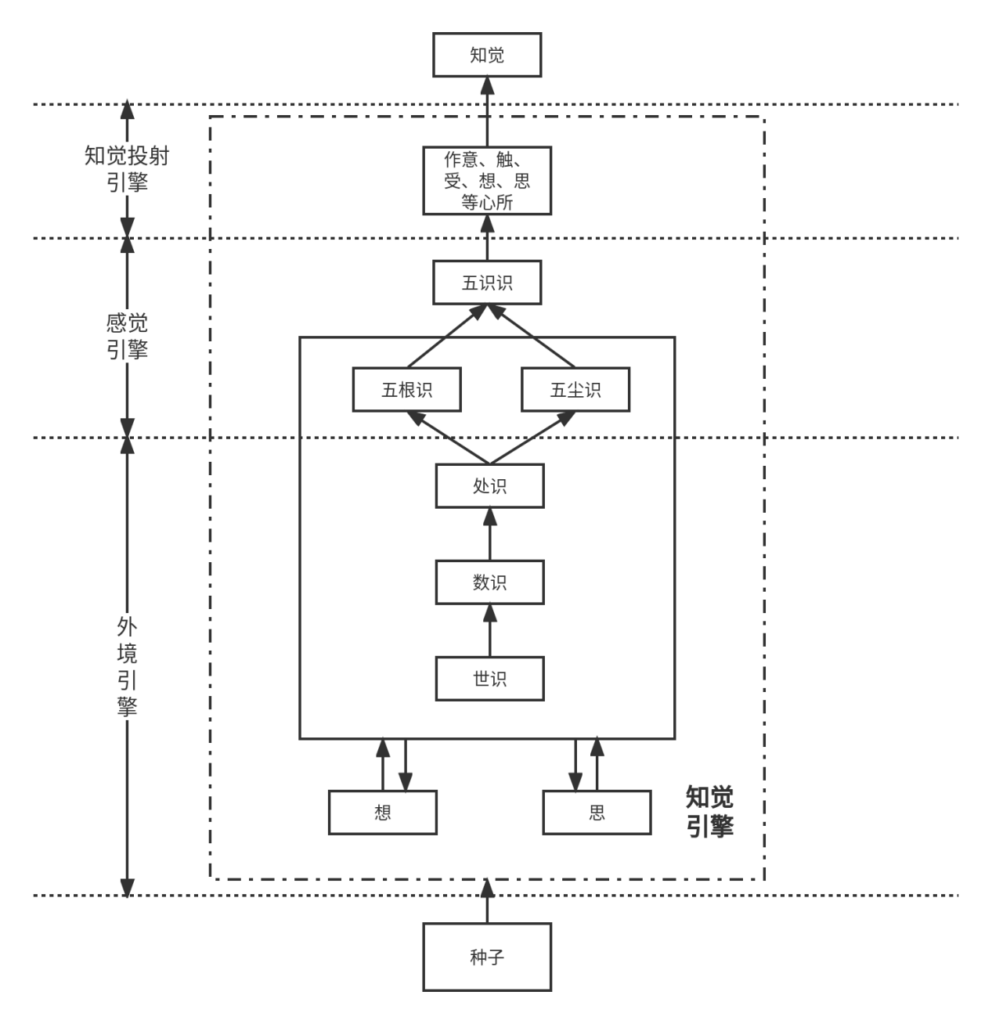
依《摄大乘论十一识的解释与十二缘起》分析,处识是器世间识,世识、数识是维持器世间底层结构的识,它们共同模拟着外境。五尘识模拟身体所应感知的外界信息,五根识模拟身体和感觉器官的效果,根尘和合生五识识。五识识模拟着前五识的效果,由此再生起知觉。世识、数识、处识、五尘识、五根识和五识识共同模拟着有外境的知觉效果。
《心所与潜意识投射》认为作意、触、受、想、思及一些其他心所也参与到从前五识到知觉的投射过程。所以,知觉投射包括三层。第一层模拟有外境的效果;第二层模拟前五识的效果;第三层是知觉投射,产生知觉。以上三层可总称为知觉引擎,共同完成从种子生起知觉的功能。第一层为外境引擎,第二层为感觉引擎,第三层为之知觉投射引擎。
知觉引擎的第一层模拟着有外境的效果,类似于建构一个模型。《受、想、思迷执与十二缘起》分析认为,第六识的想思心所根据知觉建构并运转着知觉和认知模型,想思心所有此功能。《种子层次结构》分析认为,外境引擎可能也属于第八识的想思心所,与知觉模型的运转机制相似。世识、数识、处识、六根识、六识识在阿赖耶识中的地位相当认知模型,是第八识想思心所建构的,与意识想思心所建构认知模型一样。
把以上分析综合起来形成下图。
AI解释:
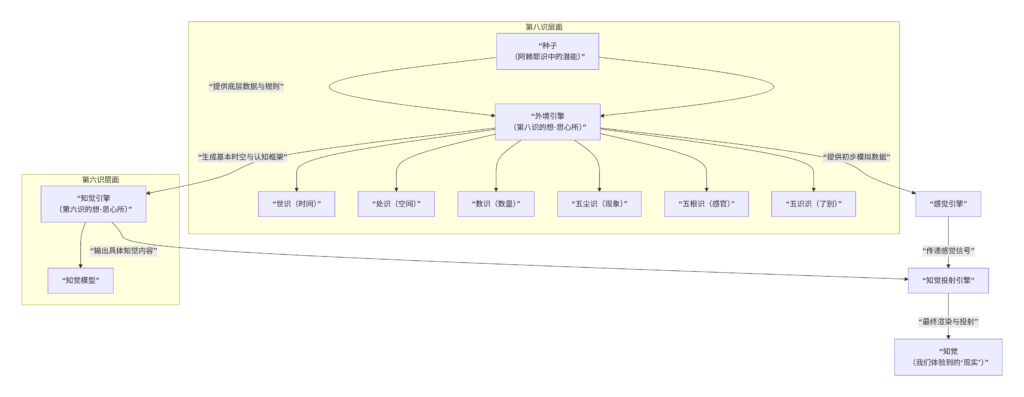
好的,这张图及其说明,是在之前所有讨论的基础上,提出的一个集大成的、高度概括的 “认知模拟引擎”模型。它将阿赖耶识(第八识)和意识(第六识)理解为一个协同工作的、多层级的模拟系统,共同生成我们体验到的“现实”。
为了清晰地展示这个由深层至表层的完整模拟流程,我们可以通过以下流程图来理解其运作机制:
对图示流程的详细解释
这个模型将我们的认知系统比喻为一个强大的“虚拟现实引擎”,它由多个子引擎协同工作,最终渲染出我们所以为的“真实世界”。
1. 底层:种子——数据库与源代码
- 这是整个模拟系统的底层数据库和潜能,储存在阿赖耶识中。它包含了所有“名言种子”和“我见种子”,是模拟所需的一切原始数据和基础规则。
2. 核心层:外境引擎——生成世界的基本框架
- 定位:此引擎被推测为第八识(阿赖耶识)自身的“想·思”心所在运作。这意味着,建构世界模型的功能,在潜意识的最深处就已经开始了。
- 功能:它负责生成我们认知世界的最基本、最稳定的框架,包括:
- 世识、处识、数识:生成时间、空间、数量等先验形式。这是我们能够经验任何事物的前提。
- 五尘识、五根识、五识识:生成似乎独立存在的“外在现象”、能感知的“感官功能”、以及能了别的“识”。这共同建构了“存在一个主体-客体对立世界”的基本幻觉。
3. 中间层:知觉引擎——生成具体的世界内容
- 定位:这是第六意识(意识)的“想·思”心所在运作。
- 功能:它接收“外境引擎”提供的基本框架和感觉信号(来自感觉引擎),进而建构出我们当下直接体验到的、内容丰富的 “知觉模型” 。比如,它不仅仅生成“空间”框架,更在这个框架里生成“一张桌子”的具体形象。
4. 输出层:知觉投射引擎——最终的渲染与呈现
- 功能:这是将“知觉模型”最终渲染并投射为我们的直接体验的关键步骤。它使得内在的心理模型获得了“外在感”和“现前感”,让我们感觉自己是直接“看到”了桌子,而不是在“想象”桌子。
核心洞察:双引擎协同模拟
这个模型最深刻的地方在于提出了 “双引擎” 的概念:
- 第八识引擎(外境引擎):是自动化、先验的。它在我们的意识觉察之下,默默地、稳定地生成着世界的基本架构(时空、根尘等)。我们认为的“客观现实”,其实是由这个深层引擎模拟出来的。
- 第六识引擎(知觉引擎):是可介入、可反思的。它在深层引擎提供的基本世界上,进行具体的、细节的认知活动。
这两个引擎的“想·思”功能是相似的,都是“建构模型”,只是层次和深度不同。它们共同协作,完成了从潜在种子到鲜活知觉的整个模拟过程。
总结与哲学深意
这张图为我们提供了理解“唯识无境”的终极技术蓝图:
- “外境”是模拟出来的:根本不存在独立于识的外境,我们所感知的一切,都是由“外境引擎”和“知觉引擎”共同模拟生成的内部影像。
- 我执与法执的根源:我们将“外境引擎”生成的稳定框架(如时空、根尘)执为实有(法执),又将在这个模拟世界中产生的“自我模型”执为实有(我执)。
- 修行的指向:真正的修行,就是要通过甚深禅观,逆向追溯这个模拟过程,亲证无论是表层的“知觉”,还是深层的“世界框架”,都只是“引擎”的模拟输出,其本身并无实性。当能照见此理,便从这场宏大而精密的虚拟现实中获得了自由。
这张图最终阐明:我们活在一個由心識自己運行的、多層級的模擬程序中。而覺悟,就是看清這個程序的本質,並從中解脫。
1.2.知觉引擎模拟哪些效果
知觉引擎整合种子生起知觉。前面已经把解读经论的方法用到了极限,要更详细地解释知觉生起的细节,还有一种方法,用逆向工程的思路从知觉效果反推。按此思路,先要分析知觉模拟了哪些效果,然后讨论怎样实现。
知觉要模拟以下效果:
第一,模拟知觉与认知的隔离。客观外境不受意识影响,故首先在意识活动和知觉之间建立隔离,让知觉不受意识干扰,具有一定客观性。
第二,模拟感觉器官的效果。比如,睁眼、闭眼造成知觉的巨大变化,但外境是稳定的,让人觉得是外境引起感觉。除了要模拟出身体、感官以及动作对知觉的影响,还要把知觉都伪装成从感觉器官获得,比如,视觉要符合透视规则,才像是眼睛看到的。
第三,模拟稳定外境的效果。身体运动时感觉跟着变化,但变化背后有个不变的外境,模拟稳定外境的效果既要模拟出身体运动造成的知觉变化,还要在变动的知觉中维持外境的稳定。比如,人绕着雕塑转一圈,他看到的形象在变,但有个不变的雕塑。
第四,模拟外境的变化规律。模拟的外境要保持协调配合,即模拟出外境稳定、连续、一贯的效果。所谓一贯就是变化背后有不变的规律。变化的知觉后面有个稳定不变的东西是外境;变化的外境后面也有个稳定不变的东西是规律。规律最稳定,其次是外境,再次是知觉。模拟有外境的效果,合理次序是先模拟最稳定的规律,再模拟比较稳定的外境,再模拟变化较大的知觉,再加上睁眼、闭眼之类修饰。
第五,保持众生境界同步。知觉境界中有一些人,他们表现得具有和自己相同的知觉,我看到一个东西,他们的行为反映出他们也能看到,并产生相应的行为。模拟出这个效果,就会相信他们是和我一样的人。
仅仅模拟出有人的效果容易,最难的是他背后真有意识,他也在建构自己的知觉境界,在其中也模拟了我。两个境界要保持同步,否则很快就会完全不同,两个人的行为就对不上了。
第六,模拟从没到过的地方,比如一个人第一次爬长城,人类第一次登上月球。这里的难点在于,新经验是从来没有过的,包含着超出过去经验的信息,但又必须保持经验整体连续和一贯,旧经验到新经验要无缝过渡,新经验的细节和旧经验能对上。
可见,模拟有外境的效果是一个巨大的工程,要处理众多细节。但细节不是无限,只要都做到位就可以成功。
如何模拟知觉和感觉效果
2.1.模拟知觉与认知隔离
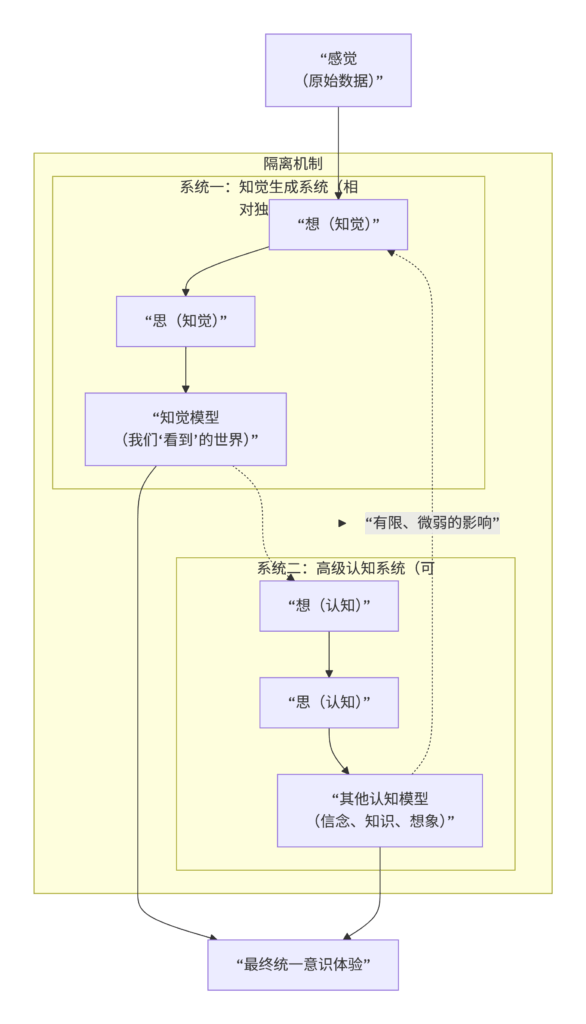
知觉与认知的隔离由知觉投射引擎实现,可以用下图说明。
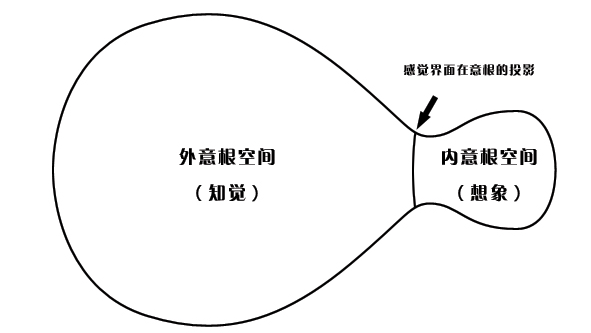
意识空间分为前后两部分,意识能够自由控制的形象思维和思想活动都在后部,知觉模型在前部,中间有一个隔离层,使后面的思维形象不会进入前部,不会对知觉造成干扰。这一机制使人很容易分辨哪些是自己想象的,哪些是外境中存在的。如果隔离机制失灵,想象的东西直接反映到知觉上,就会出现知觉混乱。
AI解释:
这张图是一个认知 / 心理空间的模型示意图,核心是区分 “知觉” 与 “想象” 对应的心理空间,并展示两者的连接关系:
- 外意根空间(知觉)这是处理外部感官信息的心理区域,对应我们对外部世界的感知(比如看到、听到的内容)。
- 内意根空间(想象)这是承载内在心理活动的区域,对应头脑中的想象、思维、回忆等主观心理建构过程。
- 感觉界面在意根的投影这是连接两个空间的关键环节:外部知觉获取的 “感觉信息”,会投射到 “意根”(可理解为心理活动的核心载体),进而成为内意根空间中 “想象” 等内在活动的素材或基础。
简单说,这个模型想表达:我们对外界的知觉,会转化为内在想象活动的 “原材料”,两者通过 “感觉信息的投射” 关联起来。
要不要我帮你梳理一份更简洁的该模型核心关系清单?
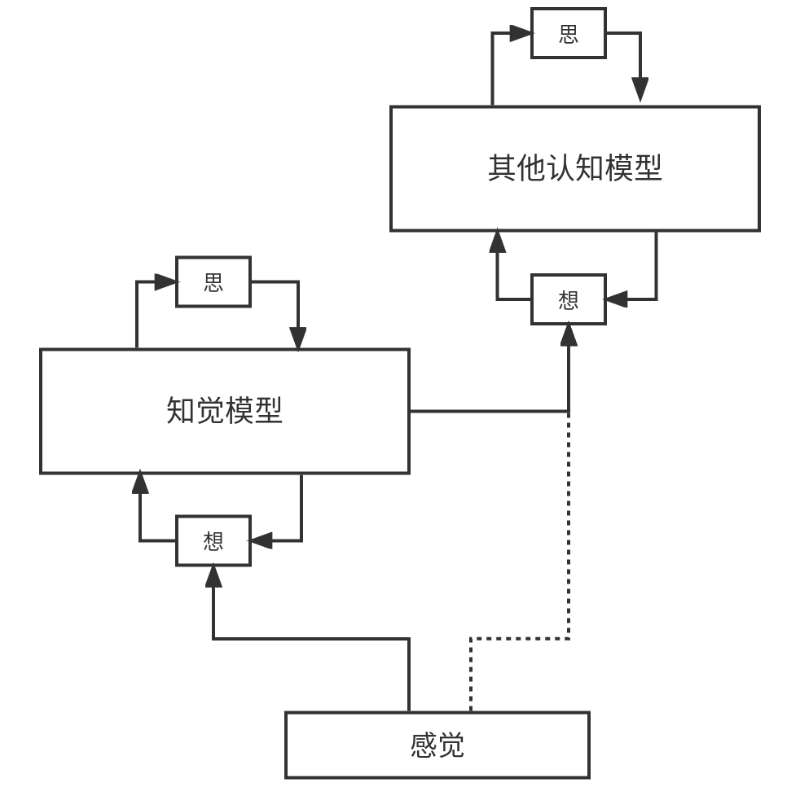
这张图也能说明隔离机制。感觉信息经一套独立的想、思系统产生知觉模型,其他认知模型由另一套想思系统在另一个空间建构和运行。这套机制使意识活动不能影响“外部”的知觉,模拟出知觉与认知隔离的效果。但隔离其实并不彻底,知觉受意识影响的例子也很多,比如黑暗中把绳看成蛇,再如望梅止渴,都是意识影响到知觉。所以,知觉不仅仅来自深层意识投射,也受到意识影响,但隔离机制使意识影响较小。
AI解释:
好的,这张图及其说明,揭示了我们的认知系统中一个非常精妙的设计——“隔离机制”。这个机制是我们能够产生“客观世界”幻觉的关键,同时也解释了为什么主观意识有时又能影响我们的知觉。
为了清晰地展示这两套“想·思”系统如何并行运作,又如何在特定情况下产生有限的相互影响,我们可以通过以下流程图来理解:
对图示流程的详细解释
这个模型的核心在于,我们的心智中存在两套相对独立的“想·思”处理系统,它们在不同的“空间”里运作,以产生稳定可靠的“现实感”。
1. 系统一:知觉生成系统(快速、自动、相对封闭)
- 输入:来自感官的感觉原始数据。
- 处理:由一套快速、自动化的 “想·思”心所 进行处理。
- 输出:生成我们当下直接体验到的 “知觉模型” 。例如,看到眼前有一个红色的圆形物体。
- 关键特性:隔离
- 这套系统被设计为相对独立和封闭,大部分时候不受系统二(高级认知)的直接干预。这模拟了“客观世界”的特性——即无论你怎么想,你看到的物理对象似乎就在那里,不会因你的想法而瞬间改变。这制造了“有一个独立于意识的外境”的强烈错觉。
2. 系统二:高级认知系统(慢速、可反思、可介入)
- 输入:部分依赖于系统一输出的“知觉模型”。
- 处理:由另一套更慢、可被意识觉察的 “想·思”心所 进行处理。
- 输出:建构语言模型、形象思维模型、信念体系等。
- 关键特性:有限影响
- 这套系统主要负责思考、推理、想象和规划。
3. 隔离与影响的辩证关系
- 隔离是主流:这种机制保证了我们世界的基本稳定。如果每一个念头都能瞬间改变我们的视觉,我们将无法正常生存。
- 影响是特例:在特定条件下,系统二可以对系统一施加有限、间接的影响。用户提到的例子非常经典:
- 把绳看成蛇:高级认知中的“恐惧”模型和“蛇”的形象,在感觉信息模糊(黑暗)时,影响了知觉系统的解读,使其直接将绳子“渲染”成了蛇。
- 望梅止渴:高级认知中的“梅子很酸”的记忆模型,直接触发了生理知觉(分泌唾液),这是一个从认知模型到生理感觉的直接影响。
总结与哲学深意
这张图深刻地揭示了“客观现实感”的神经机制和哲学本质:
- “客观性”是一种认知设计:我们认为的“客观”,很大程度上源于我们大脑中有一个被“隔离保护”的、专门用于生成即时知觉的系统。它的相对封闭性,制造了“不以主观意志为转移”的假象。
- “唯识无境”的微观证据:无论是相对独立的“知觉生成系统”,还是可以介入的“高级认知系统”,它们都是 “识” 的不同功能模块。所谓的“外境”,只是系统一输出的“知觉模型”。当系统二能够影响系统一时,恰恰证明了知觉的“可塑性”,从而弱化了其“客观性”的声称,为“唯识所现”提供了证据。
- 修行意义:禅修中训练“正念”和“如理作意”,正是在利用这种“有限影响”。我们通过系统二(正思维)持续地输入正确的认知模型(如“诸法无我”),虽然不能瞬间改变系统一的输出,但通过长期的、反复的“介入”,可以逐渐重塑系统一的处理倾向,最终改变我们感知世界的方式(转依)。这就是“修行改变现实感”的神经心理学基础。
这张图最终阐明:我们活在一种精心设计的认知隔离中,它既提供了生存必需的稳定感,也留下了意识能够参与塑造知觉、从而走向觉悟的缝隙。
2.2.感觉效果的模拟
感觉效果包括睁眼、闭眼等一系列细节,还有远近遮挡和远小近大的透视效果,符合透视才能让人相信是眼睛看到的。类似的还有景物远近浓淡效果、双眼立体视觉效果、声音远近效果、双耳立体声效果等。
有些特异视觉不符合透视,人感到视觉没有中心,是“平坦的”。这可能是没做好透视效果就直接升起的知觉。所以,透视效果是在知觉生起的最后阶段加上的,应该有一个模块负责处理感觉效果。
按实外境说和变现说,感觉器官接收外界信息产生感觉,感觉信息加工产生知觉,我们觉知到的知觉是加工的结果。
按照唯识虚像说,深层意识造成感觉,意识再对感觉信息进行加工产生知觉。知觉稳定是因为感觉稳定,且感觉到知觉的加工过程是固定的。这个解释和有外境的观点很相似,因为深层意识对意识来说也是一种外因。
按照幻觉说,知觉是知觉引擎生起的。知觉引擎分三级。第一级外境引擎模拟有外境效果,但并不是模拟出外境,模拟效果和外境的关系就像摄影棚与电影世界的关系。第二级感觉引擎模拟着感觉应有的效果,但并不像我们以为的那么稳定精细,而类似原始胶片与修饰过的胶片的关系。知觉投射引擎再依此产生知觉,不够精细和稳定的细节可以在这个环节修补。
三级引擎可以逼真地模拟出有外境的效果。但在实际运行中,三级划分未必那么清晰,尤其是后两级,完全可能有融合和简化。因为模拟感觉效果只是中间过程,最终要模拟的是知觉效果。直接根据模拟外境生成知觉,比先模拟中间效果再生成知觉更简单。这样一来就不符合感觉器官的效果了,但不仔细分辨发现不了区别。
比如,感觉引擎模拟出双眼的效果,知觉投射引擎再根据双眼图像建构立体知觉的效果,一分一合都在知觉引擎中,而且是先把一个图像拆分成两幅图像,再按照视差算法合成一个立体图像。为什么一定要插入中间过程?直接利用拆分前的信息合成立体图像不就行了?一般很难发现其中的差异。也可以两条路线并行,互相校验,使立体知觉更逼真、更稳定。这样就有三个图像同时存在,闭上右眼就投射出左眼图像,闭上左眼就投射出右眼图像,睁开双眼,投射出立体图像。
心理学实验中发现有些人没有立体视觉,他们通过立体镜看两幅有视差信息的图形,无法融合成一幅立体图像。但这并不妨碍他们在平时生活中的立体知觉。这是为什么呢?一种解释是,他们双眼图像加工成立体知觉的功能弱,所以不能融合出立体知觉。平时为什么又有立体感觉呢?因为他们平时并不是把两眼图像融合成立体知觉,而是直接从模拟外境生成立体知觉。如果立体知觉可以从模拟外境直接生成,为什么还有很多人能看出立体图呢?因为根据视差信息形成立体知觉的机制也存在,两套系统并行。
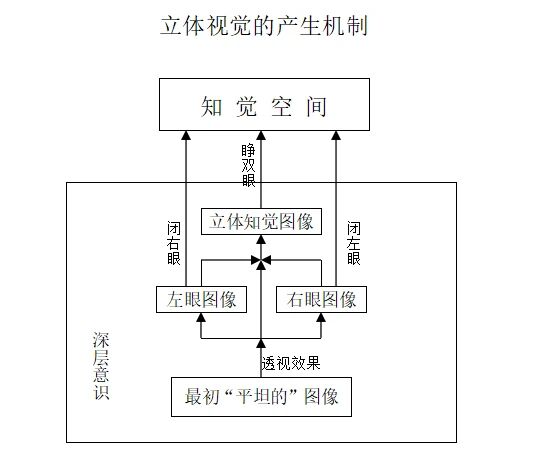
这套机制还可以解释“平坦的”特异知觉。外境引擎生成的可能是平坦的图像,它包含一定立体信息,但透视效果不明显。然后模拟双眼视觉,再根据双眼视觉建立立体知觉,一个透视效果和立体效果明显的知觉就形成了。就是说,模拟双眼视觉的过程,同时也是模拟立体效果的过程。特异视觉未经过这步模拟,故立体效果不好。
AI解释:
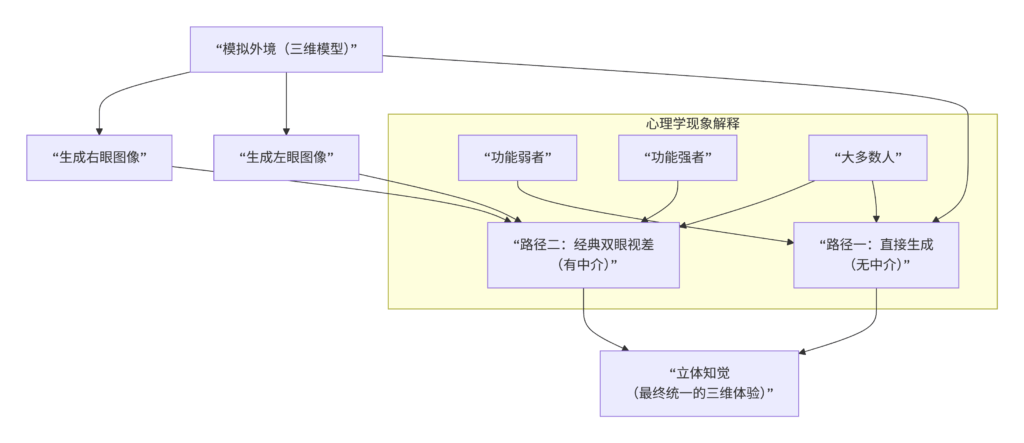
好的,这张图及其说明,以 “立体视觉” 这一具体而精妙的例子,极其生动地阐释了之前提出的 “三级引擎”模拟理论,并揭示了其中可能存在的 “并行处理”与“路径简化” 机制。
这可以说是将抽象的哲学理论,置于现代认知科学的显微镜下进行审视。为了清晰地理解这个复杂的视觉处理过程,我们可以通过下图来展示其完整的运作流程与两种可能的路径:
对图示流程的详细解释
这个流程图揭示了,我们所以为的“理所当然”的立体视觉,其实背后可能是一个多路径、高效率的复杂模拟系统。
1. 模拟的起点:同一个“外境引擎”
- 无论哪条路径,其源头都是同一个 “模拟外境” 。这个外境本身在引擎内是以三维数据存在的(如同一个3D游戏世界),它包含了深度、空间关系等所有信息。
2. 两条可能的模拟路径
- 路径二(经典双眼视差路径):
- 这是传统的、被科学详细描述的道路。外境引擎分别渲染出左眼图像和右眼图像,这两幅图像有细微的视差。
- 然后,知觉引擎中的特定算法会处理这两个二维图像,根据视差计算并合成出三维的立体知觉。
- 使用立体镜看3D图,强制要求大脑使用这条路径。
- 路径一(直接生成路径):
- 这是一条可能的 “捷径” 。知觉引擎无需经过“渲染双眼平面图像”这一中间步骤,而是直接利用外境引擎中的三维数据,生成一个“立体的感觉”。
- 这条路径更经济、高效,因为省去了一分一合的复杂计算。在日常生活中,我们主要依赖这条路径。
3. 关键解释:并行、校验与个体差异
- 并行与校验:图表说明指出,两条路径很可能是并行的。它们相互校验,使得我们的立体知觉更加稳定和逼真。比如,即使你遮住一只眼(破坏了路径二),你依然有深度知觉(路径一在起作用)。
- 个体差异的解释:
- 没有立体视觉的人:他们的 “路径二”(双眼视差融合功能)可能较弱或失效,因此无法通过立体镜看到立体效果。
- 但他们在日常生活中立体感正常:因为他们主要依靠的是高效且正常的 “路径一”(直接生成)。
- 能看出立体图的人:他们的 “路径二”功能强大,能够被特定的设备(立体镜)或技巧(对眼)所激活和利用。
总结与哲学深意
这个关于立体视觉的精细分析,为我们理解整个认知模拟系统提供了决定性的证据和启发:
- 模拟的高效性与经济性:认知系统并不僵化地遵循“感觉->知觉”的固定流程,它会为了效率和效果而优化路径。直接生成知觉,跳过不必要的中间感觉模拟,是更聪明的做法。这解释了为什么我们的体验如此直接和统一,感觉不到内部复杂的计算过程。
- “唯识无境”的强有力证据:如果我们的视觉真的只是被动接收外部光影,那么就不可能存在“直接生成立体知觉”的路径。这条“捷径”的存在,恰恰证明了我们所体验的 “立体空间”本身,是内部引擎的建构物,而非外部输入。我们体验到的,始终是引擎的 “输出结果” ,而不是原始数据。
- 修行意义的延伸:这个机制告诉我们,我们所以为的“客观”视觉,其背后都有可塑性和多种可能路径。这为修行转化提供了更深的希望:
- 通过禅修训练,我们或许可以弱化那个自动、坚固的 “直接生成路径” (它充满了无始以来的迷执),
- 同时强化那个更依赖智慧、更需要主动参与的 “校验路径” (正思维与观照),从而逐渐改变我们“看见”世界的方式。
这张图最终阐明:我们不仅活在一个模拟现实中,而且这个模拟器还内置了多条渲染路径和优化算法。觉悟,就是获得这个系统的最高权限,看清并自由选择这些路径,而不再被最高效但也最虚幻的“默认路径”所奴役。
如果模拟外境的效果
如何模拟外境
3.1.变现模拟与算法模拟
要模拟稳定且有规律的外境,一个简单办法是建构一个世界,其中有外境、有身体、身体在外境中感知。这就是变现说的解释。这一解释最大的困难是身体与环境的作用是怎么转变成知觉的?如果还需要一次转换才能变成知觉,那整个外境也只是生起知觉的一个中间环节,相当于先建一个完美模拟外境的模型,再据此建构知觉。所以,这本质上还是一套算法,变现出的世界是算法的一部分。
不用模拟,直接做出外境效果的难度比较大,所以,模拟环节必不可少。但完美模拟需要投入的力量太大,没有必要。算法模拟达到同样效果,需要投入的力量要低得多。比如拍电影,人山人海的场面都用电脑制作,虽然也可以找几千人来演一下,但电脑制作成本低多了。如果是人山人海的怪兽,电脑制作更有优势。
另外,变现外境要精确到什么程度,是否要变现出原子?那样需要的能量太大。如果变得粗,又怎么保证效果和原子级的外境一样呢?用算法实现则没有问题,不需要细的时候就粗一些,需要细的时候随时变细,灵活调整,无缝衔接。可见,用算法模拟不仅难度低,而且效果也优于变现外境。
综合考虑,心识一定是用一套算法模拟着有外境的效果,算法中可以有一个模拟外境的环节,但不会变现出外境,而是用一组算法模拟着。这组算法可以称为外境引擎,就好比制作3D动画的软件包被称为3D引擎。外境引擎包括一套世界如何运行的规律和法则,和一套世界是什么样子的描述,前者好比物理学中的方程,后者好比方程的边界条件。二者合在一起,系统就可以确定并运转了。模拟外境基础上,再模拟感觉和知觉投射的效果,三层合起来模拟出有外境的知觉。
在《“唯名无义”与真实义品中前三种真实的诠释》(点此查看)中,我们讨论说知觉、形象思维、概念都是语言。知觉引擎也是语言,是一套关于世界的观念和描述。知觉引擎与形象思维和语言有关,但不等于形象思维和语言,它比知觉、形象思维和经验记忆都深,在一个觉知不到的地方。这几套语言辗转翻译、誊写、储存创造出我们的知觉。3.2.规则与描述
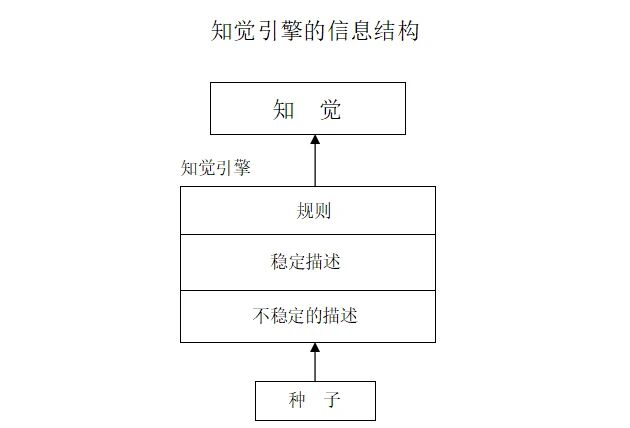
外境引擎用一套算法模拟外境,它不需要变出外境,但需要有一套对外境的表示。表示事物有两种方式,直接描述和用规则描述。直接描述就是一对一完整表示出来,这是最原始的表示方式,信息量很大。用规则描述可以大幅压缩信息,比如,说一个人,人们就会在头脑中调用人的模板,模板本身已经包含很多细节,再填上一些具体信息可以更精确。这是规则加描述信息的模式,可以比直接描述信息量上少很多。信息压缩效率最高的是物理方程,一个方程就决定了物体运动的全部细节。如果世界能全部用这种方式描述,那很少信息就可以决定全部细节。但即使是方程,也需要一些参数或边界条件,加上这些信息才能把方程确定下来,这些属于描述信息。所以,描述是基础,只有描述可以建成知觉,但只有规则不行。规则可以替换一部分描述,但不能替代全部。
规则可分为两类。第一类是规律,最明显的是科学规律,还有很多比科学更基本的规律。比如,物体出了视野之后,我们认为它在视野外的某个地方继续存在,这就是最朴素的物质不灭定律,这种朴素的形式对人的知觉影响更直接。第二类是常识,比如,我们看到雕塑的正面,经验告诉我们它一定有背面,而且背面大致是什么样子(比如是同样材质的,人像后背应该类似人的背后等等)。这些不属于科学规律,不绝对,但大部分情况下是这样。
外境引擎可以包含更多规则,也可以包含更多描述和较少规则。规则越多运行效率越高,规律性也越强。如果外境引擎包含更多规则,它的规律性更强。如果主要是靠描述信息表示,则不受那么多规则限制,这样的知觉引擎更容易出现特异现象。
普通人的知觉引擎都包括了众多规则,现代人比古代人更多。这使得人类经验到的世界规律性强,可以利用规律适应环境。但同时也使人类成为规律的奴隶,在享受规律的好处时也必须接受规律的限制。如果不想受制约,就要把规则化的知觉引擎变为描述化的知觉引擎,这和现代人的发展方向正相反,他的世界会变得规律性不那么强,生活在那个世界中不那么方便,但有更多可能行。
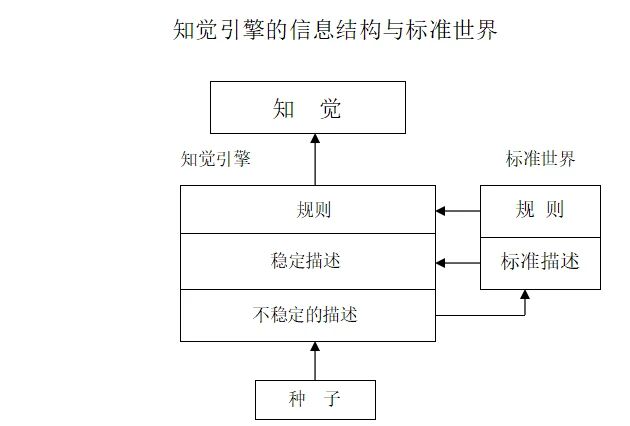
描述性信息又可以分为两类。第一类是稳定不变的描述性信息,这些不是规律,但很稳定。比如人工建筑可以几年几十年不变,星空分布和山川走势则亘古不变,都有足够的稳定性。这类信息像一份地图,是知觉引擎中最近似所谓世界的部分。
第二类是不稳定的描述信息。如果世界完全固定,那么只有前一类信息,但世界不那么僵化,还有大量相对固定的描述信息,需要定期与众生的交互确定。
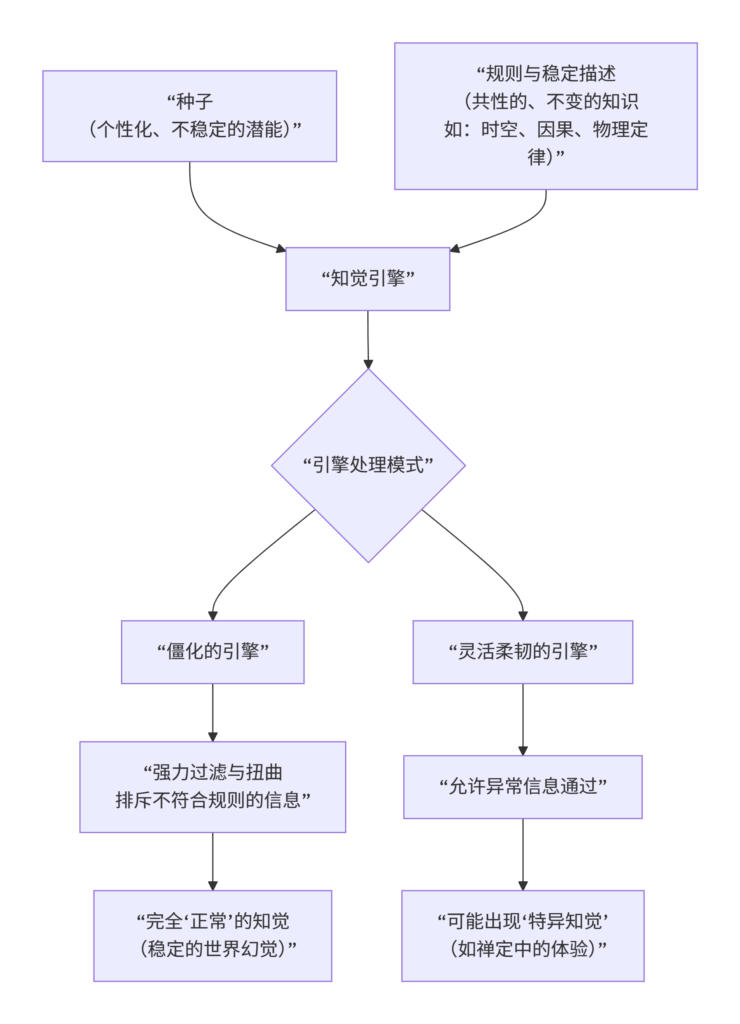
规则和描述信息是稳定的、共性的东西,种子带有的信息则是个性化。种子进入知觉引擎,引擎会自动加上这些不变的知识,建构出知觉。知觉符合这些不变的东西我们就感觉正常,有些地方不符合就会感觉异常。僵化的知觉引擎会在任何情况下都加上这些知识,甚至扭曲种子信息来保证这些知识,结果把所有异常都过滤或排斥掉了,只会有正常的知觉。足够灵活柔韧的知觉引擎不会过多排斥过滤,才能出现特异知觉。
AI解释:
好的,这张图及其说明,是对 “知觉引擎” 内部信息结构和工作原理的精要总结。它揭示了为什么我们拥有一个“稳定”的世界,以及打破这种稳定感(这对于修行而言至关重要)的可能性。
为了清晰地展示“知觉引擎”如何处理信息并最终产生“正常”或“异常”的知觉,我们可以通过以下流程图来理解其运作机制:
对图示流程的详细解释
这个模型揭示了我们的知觉是一个“个性化潜能”与“普遍性规则”相互作用的产物。
1. 信息的两个来源
- 种子(个性化、不稳定的描述):来自阿赖耶识的种子,携带了我们个人独特的业力、习气和潜在经验。它们是个性化、多变且可能相互矛盾的。
- 规则与稳定描述(共性、不变的知识):这是知觉引擎内置的 “先验原则” 或 “宇宙规则” 。例如:时空结构(世识、处识)、因果律、物体恒存性、重力效果等。这些规则是稳定、普遍、强制性的。
2. 知觉引擎的加工与两种模式
知觉引擎的核心工作,就是将不稳定的种子信息,套用稳定的规则,最终渲染出统一的知觉。
- 僵化的知觉引擎(凡夫默认模式)
- 工作方式:它会强力地、机械地将规则应用于所有种子信息。如果种子信息与规则冲突(即“异常”),引擎会选择过滤掉异常信息,或甚至扭曲种子信息,以使其符合稳定规则。
- 结果:产生一个高度稳定、一致、可预测的“正常”世界。我们感觉不到任何“异常”,因为所有异常在显现为知觉之前就已经被系统清洗掉了。这种僵化,正是“法执”和“我执”在认知层面的具体体现。
- 灵活柔韧的知觉引擎(修行目标模式)
- 工作方式:这种引擎不会过度地排斥和过滤。它允许那些与固有规则不完全吻合的“异常”种子信息通过加工,并呈现为知觉。
- 结果:可能出现 “特异知觉” 。这包括:
- 禅修中出现的各种光、音等超常体验。
- 对事物无常、无我本质的直接洞察(这本身就是对“事物恒常稳定”这一最大规则的违背)。
- 乃至究竟证悟时,照见“万法唯识”的实相,这本身就是对“心外有法”这一根本规则的全盘颠覆。
总结与修行意义
这张图从认知结构的角度,解释了修行的本质和路径:
- “正常”是认知过滤的结果:我们所认为的“正常”世界,是一个被僵化认知引擎严重过滤后的、极其片面的版本。它稳定,但并不真实。
- 修行是让引擎变得“灵活柔韧”:通过戒、定、慧的修行,我们正是在做这件事:
- 戒:减少新的、强化引擎僵化性的染污种子。
- 定:平息内心的躁动,从而降低引擎自动化过滤的强度。
- 慧:直接审视并瓦解那些被视为天经地义的 “规则”本身(我执、法执),这是对引擎底层代码的重写。
- “特异知觉”是副产品而非目标:出现特异知觉,是引擎开始放松僵化控制的标志,但它本身仍是幻象。修行的终极目标不是追求各种神通体验,而是达到引擎的完全柔韧与清净,从而能够无扭曲地照见诸法实相——缘起性空。
这张图最终阐明:我们被囚禁在一个由自己僵化认知引擎所渲染的“正常”牢笼里。修行,就是去软化这个引擎,拆掉牢笼的墙壁,从而获得心灵的真正自由。
3.3.知觉、知觉引擎、外境、世界的关系
通常认为知觉是由外境引起的,有这样的知觉是因为有这样的外境;前面讨论认为,知觉是知觉引擎引起的,有这样的知觉是因为有这样的知觉引擎。知觉引擎中的外境引擎的作用相当于通常所说的外境和世界。但外境引擎与外境有着本质的不同。打个比喻,外境引擎好比摄影棚,外境和世界好比电影中的世界。电影世界不存在,完全是观众根据电影画面想象出来的。如果电影世界不存在,电影画面又是如何拍摄的呢?是在摄影棚拍的。就拍出电影画面来说,摄影棚相当于电影世界,但二者有本质不同。摄影棚中没有电影世界,还多了很多电影画面中根本没有的拍摄设备。所以,电影世界只存在于人们的想象中,摄影棚与之有些相似,但性质完全不同,摄影棚存在,电影世界不存在。外境引擎相当于摄影棚,它造出了知觉影像,但决不是外境。
《瑜伽师地论》中把世界成住坏空的内容放到了意地,属于意识的十四胜作业,“又诸意识望余识身,有胜作业,谓分别所缘、审虑所缘、若醉若狂、若梦若觉、若闷若醒、若能发起身业语业、若能离欲、若离欲退、若断善根、若续善根、若死若生等”[59]。前十三胜作业短短一页就说完了,然后用整整一卷半解释死和生,而且分为内分生死和外分生死,外分生死讲世界的成住坏,内分生死讲入胎、出胎到死。这种结构透露出世界都在意识之内的意思,但为什么是这样呢?从电影世界的比喻看,世界确实只存在于意识中。
西方有一首神秘诗说“无物在外,无物在内,因在外者,亦即在内”,据说参透这首诗是掌握魔法的基础。为什么“在外者亦即在内”呢?因为所谓外境其实是认知模型,还在意识之中,人们把内当做是外,把模型当做外境本身,其实“在外者亦即在内”。也可以说,外境不是外境模型,是那个人们认为存在于感觉之外跟外境模型一样的东西。但这样的外境并不存在,起类似作用的是外境引擎。但外境引擎属于心识,所以说“在外者亦即在内”。由于“在外者亦即在内”,所以内与外的区别也不存在了,所以说“无物在外,无物在内”。
因为“在外者亦即在内”,能改变内,也就改变了外。意识可以影响知觉,而改变知觉意味着知觉引擎也发生了改变。如果知觉引擎的改变能延伸到外境引擎,则外境也改变了。所以,观想出来的境界也能产生生理乃至物理效果。幻术就是这个原理。3.4.知觉、外境、世界
世界包括了看到和看不到的全部外境,外境指当前可以觉知到的一小片世界。这一小片世界不一定全在当下知觉之内,比如,身后的东西看不到,不在知觉之内,但属于外境。所以,知觉、外境、世界是由小到大的关系。
人们常常把知觉模型当外境。人们以为自己见过外境乃至见过世界,如果仔细追问,他应该说直接见到的是外境,再根据外境形成世界的观念。更究竟地说,其实我们从来没有接触过知觉之外的一切,外境也只存在于我们的观念中,我们觉知到的只有知觉。当人们说看到外境时,他所指的是知觉中的事物,但他以为在外面。也就是说,人们常常是把自己的知觉当成了外境。
本质上,外境与世界都是根据知觉建构的模型。世界模型比外境模型大,综合了更多信息,但也更抽象。外境模型主要是形象,世界模型不可避免地要使用语言描述,很难完全用形象表达。高级的世界模型,更需要使用逻辑和数学语言来描述,比如现代宇宙论。
外境模型是局部,不完整,留下了需要解释的外部。世界模型比外境完整,但本质上还是局部的,不完整的。比如,如果说世界就是地球表面,它显然还有外面。即使把世界范围扩展到太阳系,扩展到已知宇宙,仍然会有外面。因为世界本质上是更大的外境模型,还是根据知觉建构的。模型始终是局部,永远不可能是全部。所谓世界之外,本质上是无知的反映。在凡夫境界,无知不可能被彻底消除,所以,世界模型永远不会完整。
如何保证同步
如何保证众生境界一致
4.1.同步机制
如果外境只是一套外境引擎,是一套观念和描述,或是一堆模型构件,为什么每个人见到的境界是一样的呢?众生的境界如何保持一致呢?
为了保证境界一致,众生必须持续保持同步,每个众生知觉上的任何改变必须立刻同步到别的众生。就是说,境界的任何改变都必须通知所有人,不完成通知就不算境界发生了改变。这使境界很难改变,必须改变时也要最大限度保持不变性最大化。规律背后都是某种不变性,不变性最大化也就是规律性最大化。[60]
保持规律可以减少同步,如果众生境界都按相同的规律演进,那么只需要定期校准,调整一下细节就可以了。需要同步的信息量少,两次同步的间隔可以较大,从而减少同步频率和信息量。这样就可以有更多众生参与同一个同步圈,也就是生到同一境界。所以,有众多众生参与的世界一定是规律性强的。
《唯识学对规律的对称性的解释》基于变现说认为众生心识的相互作用和共振是造成科学规律的原因。知觉引擎理论则可以把相互作用落实到思想传递,把形成规律的具体过程落实了。
4.2.信息交互中心
外境引擎本质上是一种算法,众生外境引擎层面的同步或通知是一种信息交互。这里可能存在一个或一群执持世界的众生作为信息交互的中心,每个人只要和他们交互就能维持对世界的看法,而不需要和每个众生直接交互。如果没有交互中心,n个人有n(n-1)/2个连接关系,而各自与交互中心联系只有n个连接。如果这个n是几十亿众生甚至更多,则平方级的连接增加是不可接受的。中心一旦形成,它自然有维护秩序的功能,对破坏秩序者要施以惩罚。为了使维持秩序更容易,他们必然要把规则定得更合理。
除中心的交互外,普通人可能也参与交互,作为中心交互的补充。周围小范围的,人与人之间的交互,可以弥补中心的不足。比如,在引介新加入者(新生儿)和中心建立联系时,周围的人可以起介绍和辅助作用。这种交互只是小范围补充,不会造成几何级数的爆炸。
新生儿和即将去世的人和这个世界的交互中心联系弱,容易出现特异知觉,看到不属于这个世界的境界。佛教说人们和这个世界的缘变弱,和净土的缘变深,净土境界就会现前。所以,这种连接也可以称为缘。
4.3.编码体系
众生外境引擎之间的信息交互一定有某种编码机制以保证效率。这套编码体系是众生相互交流传输中共同约定、磨合而成。要想高效传输,所用的编码体系,必须编排合理,传输的数据量小,而表达的信息量大。众生必须有着和某个世界其他众生大体相同的编码体系,才能和它们互动,才能转生于这个世界。这又要求传输编码容错性大,便于学习,这样即使转生于此的众生原来的编码有所不同,也能大体保持同步,并尽快完成调整。
编码体系还必须能对境界进行合理表示,信息压缩比尽量高。信息压缩的前提是境界本身有规律,然后才能利用规律进行信息压缩。境界本身的规律性越强,信息压缩比越大。和谐对称意味着不变性最大,意味着能更大限度的压缩,更高效的传输,也能支持更高效的传输语言。
众生外境引擎相互交流、互动,形成一套庞大的共振系统。外境引擎自身的规律化和编码系统的优化,使众多众生可以流畅互动,维持境界同步。《摄大乘论十一识的解释与十二缘起》中认为,这些编码和信息交流功能属于言说识。
4.4.标准世界
外境引擎用规则加描述信息的形式表示外境。其中描述性信息又可以分为稳定不变的描述性信息和不稳定的描述信息。规则和稳定不变的描述信息有两种存在方式,第一种是存储于个人知觉引擎,随时参与知觉的建构。第二种存在于众生知觉引擎中,或存在于某个专门执持世界的众生那里,个人需要时可以随时传输来。这个众生共许或执持世界者的版本是标准版,个人知觉引擎必须经常下载与之保持同步,否则知觉就无法和他人保持同步。
每个人的外境引擎都储存了一部分世界描述,描述了一些稳定不变的东西。但这些描述仅限于生起他的知觉所需,遥远地方的描述就没必要储存了。那些描述存在于其他众生或专门执持世界的众生那里,需要时可以获得。就像导航软件,人生活在哪个城市就下载哪个城市的地图,其他地图需要时可随时下载。这些地图都是完整导航软件的一部分,但每个人的导航软件不需要这么多。标准世界相当于存在服务器上的完整地图,每个人只下载了部分地图,这是每个人自己的世界。它比完整世界小,但也比知觉和身体周围一定范围的外境大得多。之所以要下载,是因为随时传输太麻烦,自己存一份常用地图使用方便。但要保持经常更新,否则就不同步了。
如果模拟新世界
如何模拟未到过的地方
模拟未见过的境界包括三方面。第一,它要有丰富的细节,这些细节从何而来?第二,如何保证每个人见到的一致?第三,如何保证未见过的部分与旧有经验一致?
如果只是个人没见过,那么比较简单,靠众生之间的同步可以实现上述三方面。比如第一次去长城,在途中和周围的人或其他众生同步,就获得了长城的信息,并在知觉上显现出来,自然能够细节丰富、众生一致、与旧有经验一致。
人来到长城脚下,其实心并没有动。按幻觉说的观点身体是幻觉的窗口,这个窗口本身没有动,窗口上幻出的知觉在变化。知觉从一地景象变为另一地的景象,中间要加载另一地的信息。心并未动,和其他心识的连接也没有变,还是原来的心识在连接并加载信息,变的只是加载的信息和投射的幻觉。随着走近长城,新信息加载,让人展开新的幻觉。
比较复杂的是模拟从来没人到过的地方。比如没人到过的深山,或人类首次登上月球。虽然没有人到过这里,但人的认识还在起作用。比如,人们通过望远镜看过月球,分析过环形山的成因,宇航员到达那里时,这些信息成为他们知觉的基础,可以保证知觉与旧有经验一致。没人到过的深山,认识线索更多。
除了他人的认识,还应该有别的信息参与其知觉形成,因为到达月球后知觉到的细节比远望和推论获得的多。这些信息可能来源于一群执持这个世界的众生,虽然人类第一次登上月球,但对它们来说,月球并不新鲜。它们可以传输细节,并保证与旧有经验一致。人类之间有密切交互,这样虽然是某个人自己在知觉,但大众的知觉引擎也在同时扩展。如果没有大量信息交互,则每个人知觉到的都不同,新境界很难稳定。
知觉引擎的建立
前往没到过的地方要靠交互信息维持知觉。新生儿进入世界,周围一切对他来说都是新的,必须靠交互获得知觉信息,知觉的稳定性、连续性、一贯性也依赖交互信息提供。如果一直这样维持知觉,必须保持大量信息交互。如果有一套自己的引擎,就可以自动运转,交互只起到校准和调整作用。婴儿的自动运转还没有建立起来,需要更多交互,成人会通过意识传递把大量信息输送给他,语言交流也是一种补充。到不需要外界干预也能自动运转并与外境保持一致时,就不需要大量交互,只需要校准和调整了。
就像一群人合唱,不断有人加入,也不断有人退出。新加入的人跟着老人学,开始唱得不好,渐渐能跟上,日趋熟练。熟练之后成为老人,再带下一代新人。下一代人熟练了,可以继续往下传了,老人就可以退出了。虽然人在不断进进出出,但歌声一直没有停止,曲调也一直保持不变。
种子与知觉引擎
知觉引擎从外界获取两类信息。一类是和标准世界同步的信息。知觉引擎的不变信息决定了知觉的大部分细节,这些细节稳定、不变、众生同步,保证了外境的真实感。还有一类信息是种子信息。知觉引擎不能完全决定知觉境界,总有一些细节不能完全确定,即使能确定的也不绝对,可以调整,甚至可以有相当大的调整。种子信息于是可以进入到知觉。
知觉引擎输入种子的信息,与固有信息结合,建构出知觉。如果知觉引擎比较僵化,知觉必须符合知觉引擎的要求,种子信息只能转化成符合要求的形式才能显现出来。如果知觉引擎灵活柔韧,则知觉可能更多反映种子本来的信息。
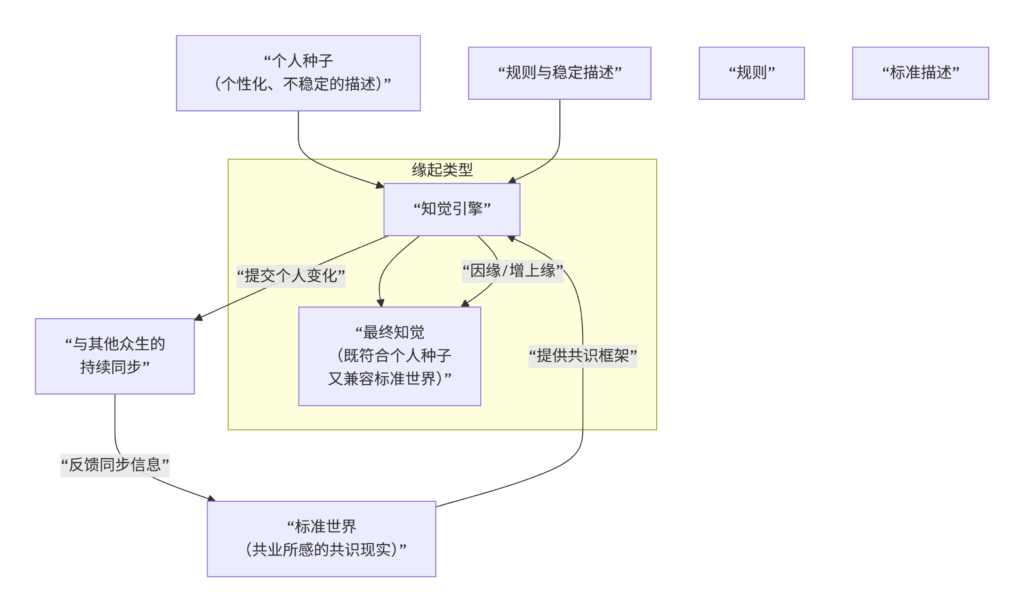
每个人的知觉都有自己的种子参与,都会与标准世界有差异,还必须随时把自己的知觉发送出去,以便保持同步。这种交互在知觉生起之前就在进行,最后形成的知觉是交互后确定的能被众生接受的形式。每个人自身种子生现行造成的知觉改变,也要在其他人的知觉中有相应调整,以保持协调。
知觉引擎获取标准世界同步信息和种子信息都不是所缘缘,因为这些信息不是作为认知对象呈现在意识面前,而是知觉引擎的信息输入,属于因缘和增上缘。
AI解释:
好的,这张图及其说明,在之前“知觉引擎”模型的基础上,引入了一个极其关键的概念——“标准世界”。这解释了为什么尽管我们每个人的内心世界(种子)各不相同,却能共享一个看似“客观”的、稳定一致的外部现实。
为了清晰地展示“个体知觉”与“标准世界”之间如何互动以达成共识,我们可以通过以下流程图来理解其运作机制:
对图示流程的详细解释
这个模型揭示,我们的个人知觉,是一个在 “个人种子” 与 “标准世界” 之间不断协商、同步后的结果。
1. 信息的三个来源
- 个人种子:来自我们阿赖耶识的独特信息,这是个性化和多变的根源。
- 知觉引擎的固有信息:引擎内置的规则与稳定描述(如时空、因果逻辑)。
- 标准世界:这是一个核心概念。它不是一个独立于我们之外的客观实体,而是由所有众生的共业所感、共同建构并维持的一个共享的、稳定的“共识现实”框架。它包含了共通的规则(如重力)和标准描述(如“水是湿的”)。
2. 动态同步:共识现实的产生
- 图表说明指出,每个人的知觉在生起之前,就在与这个“标准世界”进行交互和同步。
- 过程:你的知觉引擎会把你个人种子的信息“发送”出去,与标准世界进行“协商”。同时,它也接收来自标准世界的同步信息。最终形成的知觉,是一个既能反映你个人种子倾向,又能被其他众生所接受和理解的“折中版本”。
- 例子:这就像一个在线多人游戏,每个玩家(众生)的客户端(个人知觉引擎)都在与游戏服务器(标准世界)不断交换数据,确保所有玩家看到的世界是大体一致的。如果你的角色跳起来,这个信息需要被服务器接受并广播给其他玩家,你的动作才会在他们的世界里被“看到”。
3. 缘起类型的精确定位
- 说明最后一点非常专业地指出:种子和标准世界的信息,对于最终知觉的生成,属于 “因缘” (直接生果的主要条件)和 “增上缘” (辅助条件)。
- 它们不是“所缘缘”(即被心识所缘取、作为对象的缘)。这意味着,我们看不到“种子”本身,也看不到“标准世界”的数据库,我们只能看到它们共同作用后渲染生成的最终产品——知觉。
总结与哲学深意
这个包含“标准世界”的模型,是理解“唯识无境”和“共业”理论的钥匙:
- “客观世界”是集体协商的幻觉:我们所坚信的客观现实,本质上是一个由所有参与者(众生)的识共同维护的、动态的集体协议或共识幻觉。它的稳定性来自于持续不断的、在潜意识深层进行的同步和校验。
- 解释了个体差异与群体一致:这个模型完美解释了为什么会有“情人眼里出西施”(个人种子影响),同时又保证了“桌子对大多数人来说都是桌子”(标准世界的约束)。
- 指向修行的终极突破:
- 凡夫被困在这个“标准世界”的协议里,认为它是唯一真实的。
- 修行,尤其是达到圣者的境界,意味着能够部分或完全地超越这个“标准世界”共识的束缚。
- 当一位修行者证悟到“万法唯识”时,他实际上就是亲眼看到了“标准世界”这个服务器本身也是由“识”构成的幻象。从此,他不再完全受共业规则的支配,能够产生“神通”等超越常轨的知觉,因为他获得了直接修改“本地渲染”(乃至影响“服务器”数据)的能力。
这张图最终阐明:我们活在一个庞大的、分布式计算的虚拟现实网络中。“标准世界”是服务器集群达成的共识,而每个人的“知觉”是本地客户端渲染的结果。觉悟,就是获得管理员权限,看清并最终超越这个网络协议的限制。
2022年6月28日星期二
[59]CBETA 2022.Q3, T30, no. 1579, p. 280b26-c1